电脑系统机械手臂-电脑控制机械臂
1.如何实现机械臂动作控制?我是做工业领域的
2.机械手臂用的是什么软件
3.机械手臂共有几个关节?
4.机械臂到底有多强大?
5.机械手臂类型有哪些
如何实现机械臂动作控制?我是做工业领域的
在工业领域,实现机械臂动作控制可以用以下几种方式:
编程控制:通过编写程序,控制机械臂执行各种动作。这种方式需要对机械臂的控制器和编程语言有一定的了解。
传感器控制:通过安装传感器,如力传感器、视觉传感器等,实时获取机械臂的位置、速度、加速度等信息,从而控制机械臂的动作。
遥控控制:通过遥控器或者手机App等方式,远程控制机械臂的动作。
人机交互控制:通过人机交互界面,如手柄、手套、语音识别等方式,实现对机械臂的控制。
无论用哪种方式,都需要对机械臂的控制器和传感器有一定的了解,同时需要根据具体的应用场景和任务需求,选择合适的控制方式。另外,在进行机械臂动作控制时,需要注意安全问题,避免机械臂与人员或物体碰撞造成伤害和损失。
机械手臂用的是什么软件
机械手臂用的是什么软件
1、一般简单的当作都用单片机。
2、单片机写入代码后能简单处理一些循环重复的动作。
3、一些机器设备,有专业的操作系统,程序也是特制的。
机械手臂共有几个关节?
3~7个左右。机械手臂由多个关节和运动轴组成,每个关节及运动轴都有不同的运动方式和限制。通常,机械手臂的关节数量在3~7个左右,关节数量的多少取决于机械手臂的设计和用途。以下是几种常见机械手臂的关节构成:
1.3自由度几何结构:由3个旋转关节构成,每个关节绕不同的轴转动,可以在3个方向上实现运动。
2.SCARA型机械手臂:由3或4个关节组成,即1个旋转关节和2或3个平移关节,可实现水平平移、垂直上下、旋转和伸缩等多种运动。
3.6轴机械手臂:由6个关节构成,分别为旋转关节和伸直关节,可实现6个自由度的运动,机械手臂在X、Y、Z三个方向上分别具有旋转和伸缩的能力。
机械臂到底有多强大?
机械臂具有极高的灵活性、精准度和承载能力,机械臂的强大之处主要体现在以下几个方面:
灵活性:一些先进的机械臂,如空间站上使用的机械臂,具有多达7个自由度,这意味着它们可以像人类的手臂一样灵活地操作。这种灵活性使得机械臂能够在空间站的建设、维护、补给和使用过程中发挥不可或缺的作用。
精准度:高精准度是机械臂的另一个显著特点。例如,中国空间站的机械臂就因其高准确度而备受瞩目。这种精准度是通过结合航空电子知识和工程技术的精密设计实现的,使其在执行任务时能够精确到位。
承载能力:除了灵活性和精准度,机械臂还具备强大的力量和承载能力。这使得它们能够执行重型作业,如搬运重物、进行空间站的组装和维修工作等。
多功能性:机械臂的设计通常集成了多种功能,如悬停飞行器捕获、航天员舱外活动、舱外货物搬运、舱体状态检查等。这些功能的集成使得机械臂成为多功能的工具,能够在复杂的环境中执行多项任务。
技术先进性:一些机械臂用了国际先进的操控技术和系统设计,使其性能达到了国际领先水平。例如,中国空间站的机械臂就是中国自主研发的,其技术已经成功地应用于天宫空间站的组装和维修工作中。
这些特性使机械臂在各种领域,尤其是空间探索和应用中,成为了集中不可或缺的工具。
机械手臂类型有哪些
摘要:机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。机械手臂机械手臂类型有哪些机械手臂的组成结构机械手臂类型
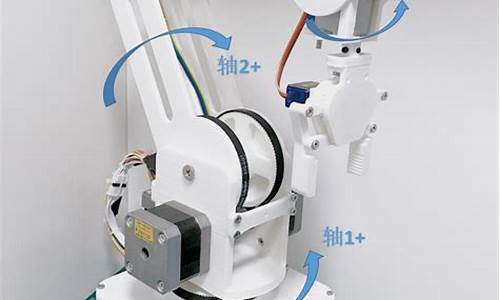
机械手臂根据结构形式的不同分为多关节机械手臂,直角坐标系机械手臂,球坐标系机械手臂,极坐标机械手臂,柱坐标机械手臂等。右图为常见的六自由度机械手臂。他有X移动,Y移动,Z移动,X转动,Y转动,Z转动六个自由度组成。
机械手臂的组成结构
(1)运动元件。如油缸、气缸、齿条、凸轮等是驱动手臂运动的部件。
(2)导向装置。是保证手臂的正确方面及承受由于工件的重量所产生的弯曲和扭转的力矩。
(3)手臂。起着连接和承受外力的作用。手臂上的零部件,如油缸、导向杆、控制件等都安装在手臂上。
此外,根据机械手运动和工作的要求,如管路、冷却装置、行程定位装置和自动检测装置等,一般也都装在手臂上。所以手臂的结构、工作范围、承载能力和动作精度都直接影响机械手的工作性能。
机械手臂的工程应用
大脑控制手臂
该机械臂由用户的头脑完全控制,灵巧到足以拿起一个玻璃杯,在没有其他人帮助的情况下喝掉一杯饮料。这个机械臂的创造者一个研究小组,成员来自于加州理工学院等机构,其中,神经芯片被植入Sorto的大脑后顶叶皮层(PPC)。
该机器臂控制芯片植入位置与之前其他瘫痪用户控制机械臂的植入位置不同,通常情况下,这种控制芯片植入位置是控制肌肉的大脑区域,而PPC是控制我们行动意图的区域,移动,并让ErikSorto控制的机械臂更加流畅和自然地运动。ErikSorto要做的就是思考他打算做什么,并通过大量的练习,能够使机械臂进行他正在考虑的任务。
橡胶机器手臂
科学家已经研制出了橡胶机器手臂,可以抓起蚂蚁而不是捏死。目前这种机械手臂还处于研发阶段,科学家把电线浸入液体硅橡胶中,待凝固后抽出电线,得到一个长5-8mm,头发丝细的触手。触手内部分为许多小格子,通过压缩空气流动来做出各种动作,可以毫无伤害的握起蚂蚁的腰部。
科学家认为这种触手将来会大有用武之地,当然不是抓蚂蚁玩儿,而是进行诸如精密的心脏及胚胎血管手术。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。